|
|
--- |
|
|
license: cc-by-nc-sa-4.0 |
|
|
pretty_name: ClaraVid |
|
|
size_categories: |
|
|
- 10K<n<100K |
|
|
extra_gated_heading: Access Request for ClaraVid Dataset |
|
|
extra_gated_prompt: > |
|
|
By submitting this request, you confirm that you have read and agree to the |
|
|
following terms: |
|
|
|
|
|
• You have reviewed and accept the CC BY-NC-SA 4.0 license |
|
|
(https://creativecommons.org/licenses/by-nc-sa/4.0/) |
|
|
|
|
|
• You will not employ the dataset in any context that could directly or |
|
|
indirectly cause harm to individuals or communities |
|
|
|
|
|
• You will properly acknowledge and cite the dataset in any derivative works |
|
|
or publications |
|
|
|
|
|
extra_gated_fields: |
|
|
First Name: text |
|
|
Surname: text |
|
|
Affiliation: text |
|
|
Country: country |
|
|
I confirm that I have read and understood the presented terms and license: checkbox |
|
|
extra_gated_button_content: Submit Access Request |
|
|
task_categories: |
|
|
- image-to-3d |
|
|
- depth-estimation |
|
|
- image-segmentation |
|
|
tags: |
|
|
- UAV |
|
|
- Aerial |
|
|
- Semantic Mapping |
|
|
- 3D Reconstruction |
|
|
- Neural Recontruction |
|
|
- NERF |
|
|
- Gaussian Splatting |
|
|
- Urban |
|
|
- Highway |
|
|
- Nature |
|
|
- Rural |
|
|
--- |
|
|
|
|
|
# ClaraVid Dataset |
|
|
|
|
|
[](https://rdbch.github.io/claravid/) |
|
|
[](https://github.com/rdbch/claravid_code) |
|
|
[](https://arxiv.org/abs/2503.17856) |
|
|
|
|
|
Official repo for: *ClaraVid: A Holistic Scene Reconstruction Benchmark From Aerial Perspective With Delentropy-Based Complexity Profiling* - Accepted ICCV 2025 |
|
|
|
|
|
> If you find this useful, please consider giving us a like ❤ |
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
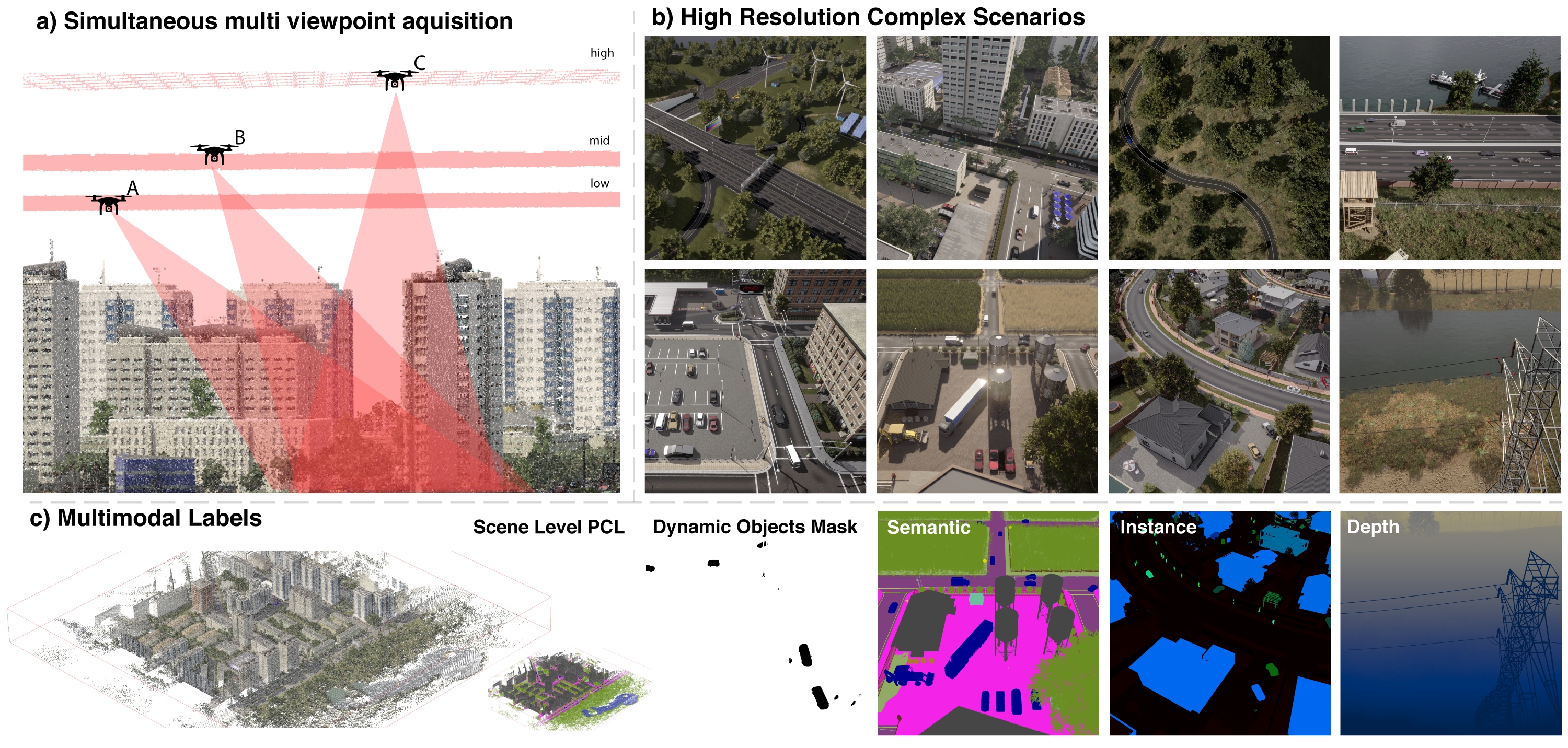
**ClaraVid** is a synthetic dataset built for semantic and geometric neural reconstruction from low altitude UAV/aerial imagery. |
|
|
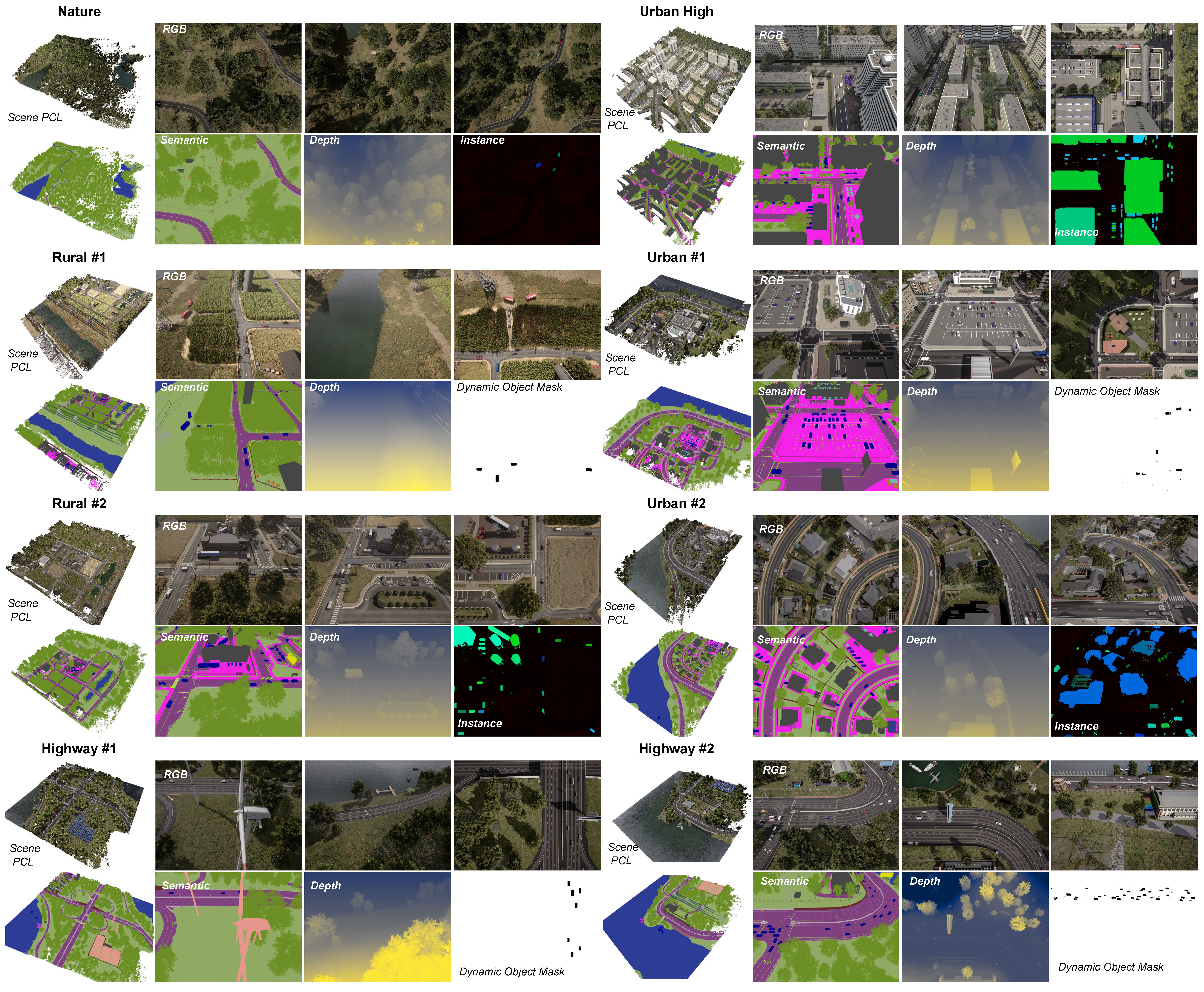
It contains **16,917 multimodal frames** collected across **8 UAV missions** over diverse environments: urban, urban high, rural, highway, and nature. |
|
|
Each mission features **3 viewpoints** and altitude levels, simulating multi-UAV operations. |
|
|
The dataset spans *1.8km^2*, with an average mission coverage of *0.22km^2*. |
|
|
It includes visual measurements at **4032x3024** resolution for *RGB images, metric depth maps, |
|
|
panoptic(semantic and instance) segmentation and dynamic object masks*. Additionally in contains *scene level pointcloud* and *camera calibration(intrinsic and extrinsic)*. |
|
|
|
|
|
|
|
|
## Channel Log / TODOs |
|
|
- [x] All data uploaded |
|
|
- [x] Release dataset SDK |
|
|
- [x] Release pip package |
|
|
- [ ] Release dataset splits |
|
|
- [ ] Add Nerfstudio support |
|
|
- [ ] Dataset download script |
|
|
- [ ] Release DSP code (closer to conference) |
|
|
|
|
|
## 3. Download |
|
|
Clone this repository and extract the data archive in the same folders. The archives were compressed using 7-Zip. We will provide a download script in the near future. |
|
|
|
|
|
## 4. Usage |
|
|
We provide a dataset SDK on [GitHub](https://github.com/rdbch/claravid_code). You can simply install it using: |
|
|
``` |
|
|
pip install claravid |
|
|
``` |
|
|
|
|
|
## 5. Dataset structure |
|
|
All collection missions follow a grid pattern with both vertical and horizontal passes at a constant altitude, with a few seconds between consecutive frames. |
|
|
|
|
|
``` |
|
|
claravid/ |
|
|
├── 001_rural_1/ # mission 1 |
|
|
│ ├── left_rgb/ |
|
|
│ │ ├── 45deg_low_h/ # 3 different viewpoints (pitch&altitude) & flying orientation in grid (horizontal or vertical passes) |
|
|
│ │ │ ├── 000000.jpg |
|
|
│ │ │ └── ... |
|
|
│ │ ├── 45deg_low_v/ |
|
|
│ │ │ └── ... |
|
|
│ │ ├── 55deg_mid_h/ |
|
|
│ │ │ └── ... |
|
|
│ │ ├── 55deg_mid_v/ |
|
|
│ │ │ └── ... |
|
|
│ │ ├── 90deg_high_h/ |
|
|
│ │ │ └── ... |
|
|
│ │ └── 90deg_high_v/ |
|
|
│ │ └── ... |
|
|
│ ├── depth/ # metric depth |
|
|
│ │ └── ... |
|
|
│ ├── panoptic_seg/ # instance (buildings, humans and vehicles) & semantic segmentation |
|
|
│ │ └── ... |
|
|
│ ├── semantics_colormap/ # semantic segmentation - RGB color version |
|
|
│ │ └── ... |
|
|
│ ├── dynamic_mask/ |
|
|
│ │ └── ... |
|
|
│ ├── extrinsics/ |
|
|
│ │ └── ... |
|
|
│ └── scene_pcl/ # scene level PCL (color, semantic, instance) @ various resolutions (30cm, 50cm, ...) |
|
|
│ ├── panoptic_seg/ |
|
|
│ │ ├── global_fused_30cm.ply |
|
|
│ └── ... |
|
|
├── 002_rural_2/ # mission 2... |
|
|
│ └── ... |
|
|
└── ... |
|
|
``` |
|
|
|
|
|
## 6. Mission Overview |
|
|
|
|
|
 |
|
|
|
|
|
## 6. Data format |
|
|
|
|
|
| **Modality** | **Directory** | **Extension** | **Description** | |
|
|
|-----------------------|---------------|---------------|-----------------| |
|
|
| RGB | left_rgb | .jpg | 4032 x 3024 | |
|
|
| Depth | depth | .png | metric depth - \[0-1000\]m | |
|
|
| Panoptic Segmentation | panoptic_seg | .png | instance (buildings, humans and vehicles) + semantic mask | |
|
|
| Dynamic mask | dynamic_mask | .png | binary mask for objects that move (dynamic_elements == 0) | |
|
|
| Camera Extrinsics | extrinsics | .json | in scene space (metric) | |
|
|
| ScenePointcloud | scene_pcl | .ply | scene pointclouds in scene space | |
|
|
|
|
|
Please refer to our [SDK](https://github.com/rdbch/claravid_code/blob/main/claravid/dataset.py) for more details regarding the data format. |
|
|
|
|
|
## 7. BibTex |
|
|
If you find our work useful, please consider citing: |
|
|
|
|
|
``` |
|
|
@article{beche2025claravid, |
|
|
title={ClaraVid: A Holistic Scene Reconstruction Benchmark From Aerial Perspective With Delentropy-Based Complexity Profiling}, |
|
|
author={Beche, Radu and Nedevschi, Sergiu}, |
|
|
journal={arXiv preprint arXiv:2503.17856}, |
|
|
year={2025} |
|
|
} |
|
|
``` |
